

项目描述
1 项目简介
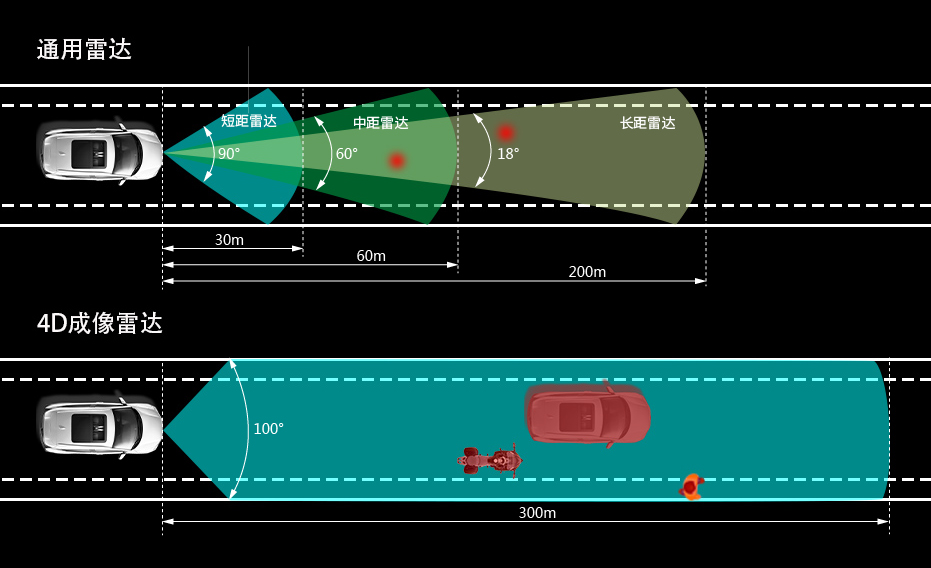
项目简介:本项目为车载4D高分辨点云成像毫米波雷达智能传感器的研发(以下简称4D点云毫米波雷达),传统的毫米波雷达通过测量目标的距离和角度得出2D平面坐标以及速度信息,没有高度坐标,因此可以简单的理解为平面雷达。4D点云毫米波雷达可以测量目标物体的3D坐标+1D速度,比普通毫米波雷达多了纵向天线和处理器,可以检测不同高度,不同水平面的运动和静止物体。
2 技术创新性
技术创新:项目所处阶段:本项目目前处于样机测试阶段,目标是达到16线激光雷达效果;
与国内外同行对比:国内尚无雷达厂商发布4D点云毫米波雷达;美国傲酷雷达(Oculii)2018年发布了第一代4D点云成像雷达Falcon(猎鹰),探测距离在200米,点云数在5万点/秒。
本项目技术先进性:
a、合成孔径雷达(SAR):旨在解决与处理及多普勒相关的问题,如在定位移动目标时提高处理能力及提升精度等难题。
b、同时定位与地图构建(SLAM):该技术提升雷达平台的目标分离(target separation)及分辨率提升等问题,同时还彻底解决了误报问题。
c、认知雷达算法:引入基于机器学习的方法进行目标分类,有效区分小车、人、树等。
d、进一步通过虚拟方式增加天线个数,通过算力增加MIMO的倍数,进而提高角分辨率。
3 经济可行性
市场需求:
传统毫米波雷达存在无法点云成像,及精度低等技术局限,无法满足自动驾驶L3级别以上需求,而激光雷达成本又居高不下,行业内寻求一种低成本、可靠的高精度传感器的步伐从未停止。4D点云毫米波雷达的研发,可完全满足自动驾驶L2~L4应用需求。
对比国内外同行技术水平,我们的市场定位非常清晰:对国外市场避强定位策略,暂未直接参与Tier 1的合作;在国内市场,我们主打极致性价比、差异化应用、被集成战略——性能达到国外竞品的同等水平,价格定位在80%。积极参与汽车电子集成商合作,推进整体解决方案应用。优先支持特定应用场景合作客户,例如中联酷哇扫地机器人、三一重工等。
行业技术壁垒
毫米波雷达行业具有较高的技术壁垒,国内厂商普遍呈现出高知背景,创始人不是实验室研究员,就是在相关行业(汽车电子、通信)浸淫多年的老江湖;大致分为院所派、海归派、大企业出身派、实业派。同时,由于近年雷达技术军转民的特性,纳雷科技军工研发背景的人才在这一领域也就别具优势。
4 团队运营情况
团队:核心团队:
韩先生,男,45岁,博士,高级工程师,是纳雷科技母公司湖南华诺星空电子技术有限公司的创始人和董事长,本科及硕士专业为电磁场与微波技术。20余年专业从事计算机、雷达与信号处理、智能传感器领域的研发经验,在社会公共安全、反恐救援和重要场所安防领域开拓性地使用雷达/光电/微震/视觉等多传感融合技术,相关装备及产品国内领先,积累了广泛的客户。2014年3月入选科技部“创新人才推进计划科技创新创业人才”,2016年入选国家万人计划。该同志先后主持或参与科研项目9项,获得军队科技进步二等奖2项,三等奖3项,发表科技论文30多篇,科技成果7项,专利15项,软件著作权28件。
衣女士,女,44岁,博士,副研究员,湖南纳雷科技有限公司法定代表人。1992年考入国防科技大学计算机系,2001年获国防科及大学计算机体系结构专业博士学位。衣晓飞同志博士期间从事图像处理算法的研究,2002年开始于计算机学院微电子所从事通用及专用CPU设计,主要研究方向是CPU芯片的存储系统设计及后端设计,是微处理器方向的业务骨干,具有丰富的工程经验,作为骨干参加了863、973及银河五、天河一、天河二超级计算机等国家项目的研究,先后参与研究的国产芯片有FT64,FT64-2,FT1000,FT1500。先后获军队科技进步一等奖两项,获专利授权十多项。对于ASIC的前后端设计均有丰富经验。